Résumé de section
-
L’ENSICAEN, en tant que bâtiment, est le lieu nous réunissant toutes et tous dans notre quotidien professionnel. Elle aura fêté en 2018 ses 40 ans. Un très grand nombre de nos anciens élèves ont maintenant contribué à développer une très grande diversité de produits (médical, automobile, avionique, etc) et nous travaillons tous directement ou indirectement à cela. Pourquoi ne pas travailler tous ensemble sur notre école en tant que produit et système à part entière afin de nous aider un jour à en avoir un usage plus responsable ! Tel est le postulat de départ de ce projet.
Le projet immersif en majeure SATE vise à proposer une solution d’instrumentation et de mesures environnementales du comportement de nos salles de travail. Ce projet s’insère pleinement dans le domaine actuel de l’internet des objets (IoT ou Internet of Things) et cherche également à proposer un démonstrateur extérieur de nos compétences scientifiques en formation. Ce projet espère également être un terrain d’entraînement complet pour les élèves ingénieurs en cours de formation. Les salles A201 et A203 du bâtiment principal, rénovées en 2021, seront utilisées comme salles témoins. Observons en quelques points clés les objectifs du projet :
Projet suivi sur plusieurs années et différentes générations d’étudiants
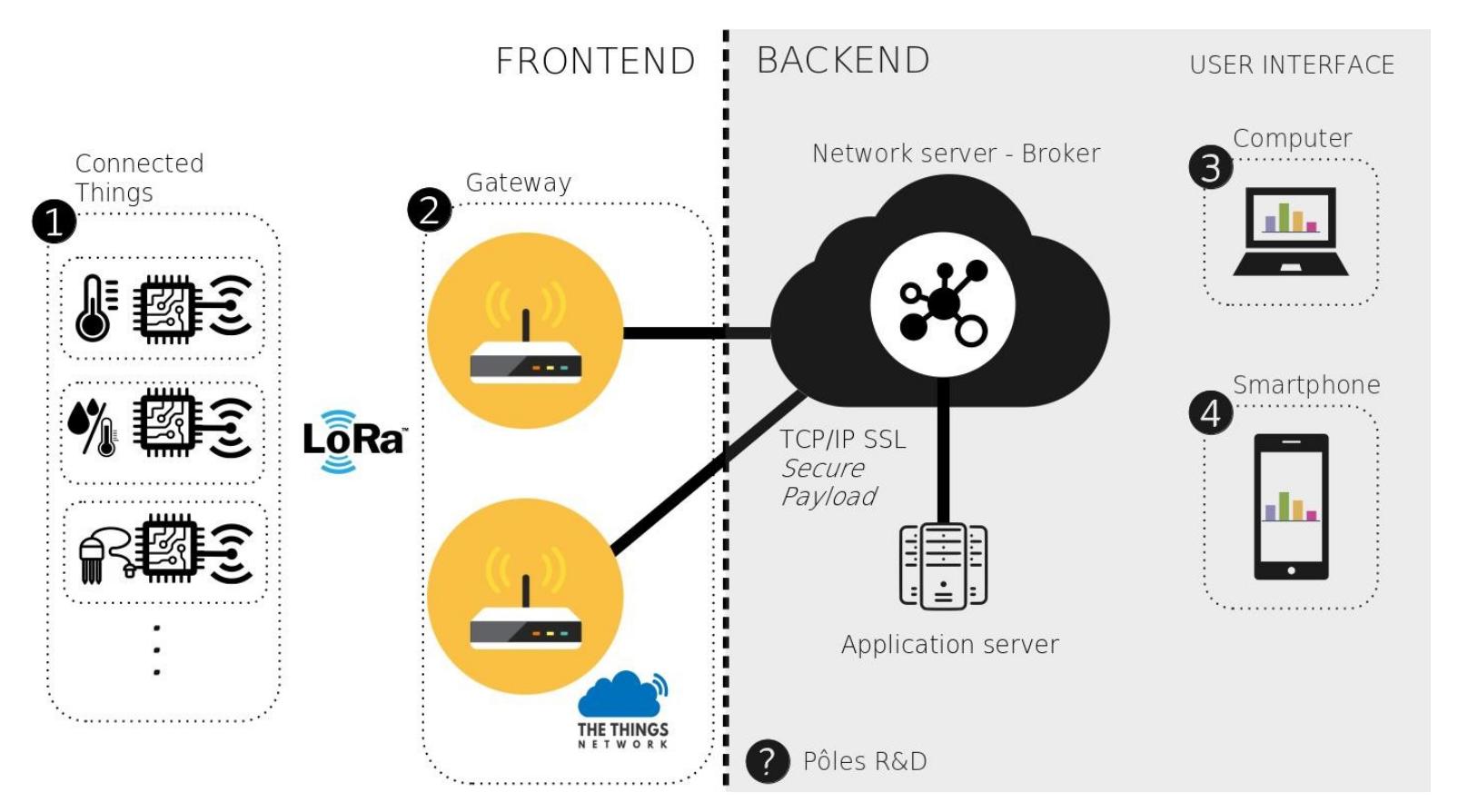
Conception et réalisation de différents objets connectés (capteurs et actionneurs)
Conception et réalisation de passerelles LoRa (Gateway)
Conception et réalisation d’applications utilisateur pour ordinateur et smartphone
Stockage et transfert sécurisé des données
Suivi de versions des solutions sous Git sur serveur école
Dépôt GitLab ENSICAEN :